
from djitellopy import Tello
from time import sleep
tello = Tello()
tello.connect()
print(tello.get_battery())
tello.takeoff()
"""
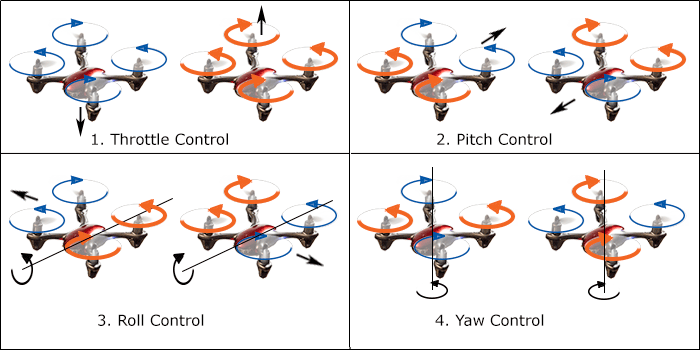
roll - вправо(+)/влево(-),
pitch - вперед(+)/назад(-),
throttle - вверх(+)/вниз(-),
yaw - по часовой(+)/против часовой(-)
send_rc_control(roll, pitch, throttle, yaw)
"""
sleep(2)
tello.send_rc_control(0, 15, 0, 0)
sleep(2)
tello.send_rc_control(0, 0, 0, 0)
sleep(2)
tello.send_rc_control(15, 0, 0, 0)
sleep(2)
tello.send_rc_control(0, 0, 0, 0)
sleep(2)
tello.send_rc_control(0, -15, 0, 0)
sleep(2)
tello.send_rc_control(0, 0, 0, 0)
sleep(2)
tello.send_rc_control(-15, 0, 0, 0)
sleep(2)
tello.send_rc_control(0, 0, 0, 0)
sleep(2)
tello.land()